Train Safer Autonomous
Vehicles. Faster.
Across sensor ingest, model training, data curation, and simulation, NeuralMesh™ delivers a high-performance data platform that eliminates storage bottlenecks, keeps GPU clusters fed, and accelerates every stage of the autonomous vehicle development pipeline.
Leading autonomous vehicle organizations are modernizing their data infrastructure with NeuralMesh.



NeuralMesh Helps Accelerate AV Training, Simulation, and
Fleet Data Ingest
Legacy storage wasn’t designed for the concurrency, metadata scale, and ingest velocity of autonomous vehicle (AV) pipelines. GPU clusters sit idle waiting for data, simulation re-runs eat budget, and one-day retrains stretch into weeks. Combined, NeuralMesh™, NeuralMesh™ Axon™, and Augmented Memory Grid™ deliver the performance needed to keep autonomous vehicle programs in the fast lane.
Reproduce Any Training Run
Version every dataset and trace data lineage from sensor ingest through training for liability investigation, safety compliance, and regulatory defense.
Checkpoint without Stalls
Absorb checkpoint write storms without job stalls so training runs complete reliably and
expensive GPU cycles aren’t wasted
on re-runs.
Speed Up Simulation Pipelines
Feed synthetic data generation at scale so simulated rare-scenario edge cases reach the training set faster and cover what real driving can’t capture.
Maximize GPU Saturation
Keep training clusters fed with high-bandwidth, low-latency data access to eliminate idle GPUs and sustain 90%+ utilization across distributed AV workloads.
Eliminate Data Pipeline Sprawl
Span edge, core, and cloud in a single namespace so sensor data, training sets, and simulation outputs share one infrastructure without data copies.
Scale to Exabytes
Handle billions of sensor files without metadata collapse, with predictable linear scaling from daily fleet ingest to full AV
training archives.
NeuralMesh Delivers the Performance and Reliability to Power the Full AV Development Pipeline
Sensor ingest, model training, data curation, and simulation each place different demands on storage infrastructure. NeuralMesh supports the complete AV development workflow in a single namespace, from the first captured frame to the deployed model.
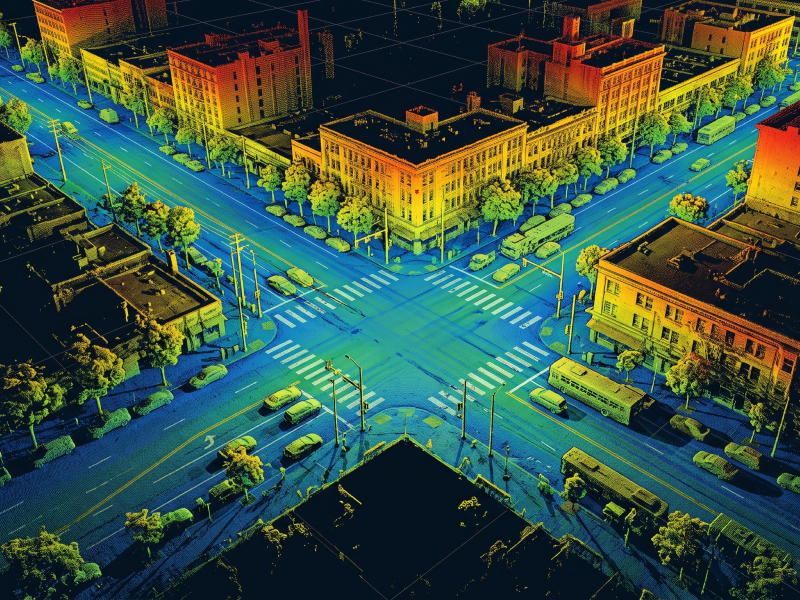
Sensor Data Capture and Ingest
Active and simulated fleets stream LiDAR, radar, and camera data continuously. NeuralMesh eliminates pre-processing backlogs by ingesting multi-petabyte daily fleet data directly into the training data lake without queuing delays.
Model Training and Validation
Training clusters require high-bandwidth, concurrent data access with frequent checkpointing. NeuralMesh eliminates I/O wait, reducing costly stalls and job re-runs across distributed training workloads at scale.
Data Curation and Active Learning
Metadata searches across billions of sensor frames is the real bottleneck — not raw capacity. NeuralMesh eliminates Lots Of Small Files (LOSF) challenges and enables instant promotion of archive data back into the hot training set.

Simulation and Synthetic Data Generation
Generating rare edge-case scenarios is massively data intensive. NeuralMesh feeds simulation workloads at the throughput required to produce, store, and replay synthetic sensor data without slowing the pipeline.

NeuralMesh Offers a Proven Solution for Autonomous Vehicle Teams

“We looked at our legacy architecture, and instead of taking an evolutionary approach, upgrading every component, we took the revolutionary approach. NeuralMesh cost-effectively enables the use of both POSIX and object storage with performance and latency that is far superior to any other solution.”

“We built a GPU farm that needed a high-speed data pipeline to feed it… we chose WEKA for its ability to provide cost-effective, high-bandwidth I/O to our GPUs and for its product maturity, customer references, and stellar on-demand support.”

“WEKA’s storage scalability and ability to grow the infrastructure without losing performance was a key factor in the decision to select WEKA.”

Choose NeuralMesh to Accelerate Autonomous Vehicle Workloads
For the high performance, low latency workloads across the autonomous vehicle industry, NeuralMesh unifies sensor data to accelerate training, simulation, and validation. Ready to see what’s possible with NeuralMesh?
Common Questions, Straight Answers
The AV pipeline has four stages with different storage demands: sensor ingest (high throughput, massive volume), model training (low latency, high concurrency, frequent checkpoints), data curation (metadata at scale, cold-to-hot promotion), and simulation (throughput-intensive, replay-heavy). Most legacy architectures force separate systems for each stage, multiplying data copies and management overhead. NeuralMesh handles all four stages in a single namespace, removing the silos that slow the pipeline.
AV training pipelines generate enormous sensor data volumes from LiDAR, radar, and camera feeds. A single vehicle can produce 40TB or more in a single day. Legacy NAS systems break under this load because they weren’t built for the metadata demands of billions of small files at scale. A parallel, distributed file system like NeuralMesh handles the concurrent ingest, curation, and training access patterns without performance degradation, keeping GPU clusters fed and training runs on schedule.
YIn most AV training environments, GPUs sit idle because the storage layer can’t deliver data fast enough. That idle time is the most expensive failure mode in the entire stack. NeuralMesh Axon embeds a high-performance data layer directly inside GPU servers to drive GPU utilization well above what legacy storage delivers. Learn more about GPU acceleration with WEKA.
A single AV fleet generates billions of individual sensor frames over time. The challenge involves indexing, searching, and promoting specific frames from cold archive back into active training sets on demand. Legacy systems collapse under that metadata load. NeuralMesh’s distributed architecture handles billions of small files in a single namespace without degradation, ensuring any frame can be retrieved and reactivated instantly.
AV teams typically train models on-premises but run inference in the cloud or on edge compute in the vehicle itself. NeuralMesh presents a single namespace across on-premises, edge, and cloud infrastructure so data is always available where and when it’s needed without manual syncing or data copying.
AV model training runs involve thousands of GPUs running in parallel. When a node fails mid-run, the job rolls back to the last checkpoint. So if checkpointing is slow or unreliable, that rollback gets expensive fast. NeuralMesh handles checkpoint write storms without slowing the overall training run, absorbing burst writes and ensuring recovery points are captured frequently enough to keep re-run costs minimal. Learn more about checkpointing in distributed training.
When a vehicle is involved in an incident, AV developers must reconstruct exactly what the model was trained on and what sensors captured at the time. NeuralMesh versions every dataset and preserves frame-accurate snapshots of what a vehicle “saw,” enabling full data lineage tracing from ingest through training. This capability supports incident investigation, regulatory compliance, and liability defense. Learn more about AI data management with WEKA.
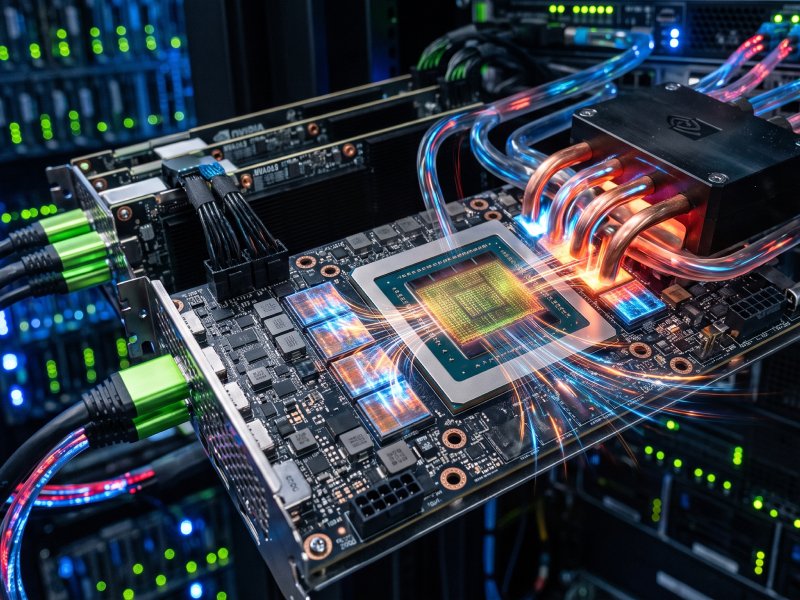
WEKA is validated on NVIDIA DGX SuperPOD and supports NVIDIA GPUDirect Storage, creating a direct path from NVMe storage to GPU memory that bypasses the CPU entirely. This removes a primary latency source in AV training pipelines and the full stack is NeuralMesh AIDP certified and procurement-ready. Learn more at WEKA x NVIDIA.